|
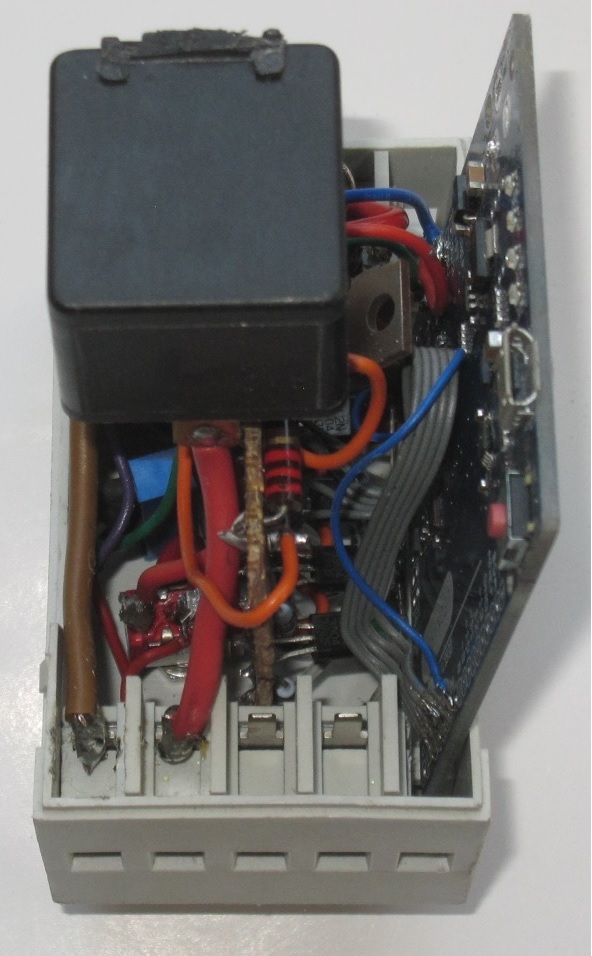
| Kuva 1. Testeri kotelossaan päältä nähtynä |
Tämän projektin tähtäimenä oli
rakentaa testeri, millä voi tutkia akun jäljellä olevan
kapasiteetin. Käyttö on sellaisia olosuhteita varten, missä
aurinkopaneeleilla tai / ja tuuligeneraattoreilla ladataan akkuja.
Toisin sanoen tilanteessa, missä verkkosähköä ei ole
käytettävissä akkujen lataamiseen.
Näissä olosuhteissa on tyypillisesti
useita akkuja rinnan. Ne voivat hyvinkin olla eri ikäisiä, ja
tavoitteena on akku kerrallaan tutkia, onko kyseinen akku vielä
käyttöön riittävä, vai syytä vaihtaa uuteen. Tämä ei ole
mikään tarkkuusmittalaite, vaan pyrkimyksenä on saada tietää
mitatun akun käyttökelpoisuus.
 |
| Kuva 2. Lataus- ja purkuvirtojen reittien kytkentä. |
 |
| Kuva 3. Laite alta. Ylhäällä kuormituslamput. |
|
|
|
Vaatimuksena ja edellytyksenä on siis
mahdollisuus ladata testattava akku muista akuista. Suositeltavaa
onkin aloittaa testaus silloin, kun akut ovat mahdollisimman täynnä.
Tällöin lataukseen kuluu aikaa mahdollisimman vähän.
Kuormaksi on mahdollista valita yhdestä
kolmeen 20 W lamppua. Kun kaikki kolme ovat käytössä, on kuorman
virta noin 5 A, mikä on suurin piirtein sama, minkä esim.
tuollainen Peltier-elementillä toimiva pieni jääkaappi. Testi
toisin sanoen testi kertoo suoraan, miten kauan testattava akku
pystyisi syöttämään tuollaista jääkaappia.
Annoin yllä ymmärtää, että
laitteen tarkkuus ei ole kovin hyvä. Virhetekijöitä on mm.
seuraavia:
Akku ladataan noin 7 A virralla
14,5 V:n jännitteeseen. Akku ei välttämättä ole täysin
latautunut jännitteen käväistessä tuossa tasossa. Tilannetta
parantaa tosin se seikka, että lataus pulssituksen kautta tapahtuu
siten että 2 s latausta ja 1 s taukoa. Tähän suurin syy on
kuitenkin jäähdytyslevynä toimivan alumiinisen U-palkin pienuus.
Se taas johtuu siitä, että kotelo vaihtui kehityksen aikana
suuremmaksi.
 |
| Kuva 4. Aikamoinen sotku. |
|
Hall-generaattorin (LCB-050B)
mittausalue on 50 A. Joten esim. 5 A kuormalla tarkkuus ei voi olla
juurikaan 10 % parempi.
Akku puretaan 11 V tasoon. Tällöin
akku ei ole täysin tyhjä, vaan kapasiteettia on vielä jäljellä.
Tämä taso säästää akkua. Syvemmästä purkauksesta ei tässä
tapauksessa ole mitään hyötyä, sillä (testimittauksissa
ilmennyt) noin 70 – 80 % tarkkuus kertoo kyllä mainiosti akun
käyttökelpoisuuden jatkossa.
Laitetta on rakennettu ja kokeiltu
pienissä erissä. Sisäkuvasta näkee, että se ei sovi kenellekään
malliksi ja ohjeeksi; korkeintaan varoittavaksi esimerkiksi.
 |
| Kuva 5. Hakkuriohjaimen kytkentä. |
 |
| Kuva 6. Erillisten releiden kytkentä. Koskettimet näkyvät kuvassa 2. |
Alussa ohjelma tuntui varsin
yksinkertaiselta. Ladataan akku, puretaan se ja samalla mitataan
kuorman virta sekunnin välein, jaetaan lopuksi luvulla 3600, ja
saadaan näin akun kapasiteetti ampeeritunneissa. Lopuksi ladataan
akku.
Periaatteessa kylläkin näin. Tuota
ajatusta vastaan sotii tieto, että esim. alla oleva ohjelma on
versio 14. Eri ohjelmia syntyi kaikkiaan 36 kappaletta. Jotain pieniä
yksityiskohtia piti kehittää erikseen. Suurin syy tähän oli
häiriöt. Tässä käsitellään kuitenkin melko suuria tehoja,
mitkä aiheuttavat jännitepiikkejä. Yksi ongelma on myös minussa.
En suunnittele etukäteen sopivia komponentteja, vaan pengon
laatikoita ja valitsen siltä, mitä löytyy ja mitkä saattaisivat
olla soveltavissa. Tässä toimii jälleen vana viisaus: ”Älä tee
niin kuin minä teen, vaan tee niin kuin minä sanon!”
Alussa käytössä oli ”sopiva” ja
laadukas induktanssi. Nyt hakkurin (mikä siirtää tehoa akusta
toiseen) teho nousi yli 200 watin, joten käytössä ollut neljän
releen yksikkö (4 Relay Module) otti nokkiinsa, totesi että nyt
riitti, katkoi painitun piirin kalvoja ja ilmoitti mielipiteensä
savumerkein.
Piti rakentaa uusi yksikkö tukevammin
relein. Käytin siinä autojen varaosareleitä (12 V 20/30 A).
Samalla pienensin hakkurin oskillaattorin pulssisuhdetta ja
latausvirtaa.
Yksi iso ongelma pysyi kuitenkin melko
tiukasti mukana. Se oli häiriö, mikä sotki LCD-näytön. Näytöllä
pyöri ihan mitä sattuu juuri kun testi oli edennyt ja Ah-lukema
pian luettavissa. Tähän oleellisin ratkaisu oli ottaa LCD-näytön
5 V:n syöttö Arduinon vastaavasta lähdöstä. Silti muutama
suodatuskonkka releiden kytkimissä oli paikallaan.
Laitteessa on myös reset-painike,
sillä kytkettäessä laite akkuun (A1, syöttävä), on hetkellinen
virtapulssi melko suuri. Kun akut on kytketty, onkin hyvä painaa
resettiä, jonka jälkeen ohjelma latautuu uudestaan, ja kuorma
voidaan valita ja testi käynnistää.
LAITTEEN KÄYTTÖ:
Muutama sana ohjelmasta ja käytöstä:
Ensin kytketään laitteen liittimet syöttävään akkuun (A1). Kun
näyttöön ilmestyy kehotus valita purkausteho ja käynnistys,
voidaan liittimet kytkeä testattavaan akkuun (A2). Käynnistyksen
jälkeen ohjelma tutkiin, ettei akkujen jännite-ero ole liian suuri.
Seuraavaksi tutkitaan, onko akussa A1 riittävä jännite (yli 13,5
V). Jos kaikki on tähän saakka kunnossa, alkaa latausvaihe. Aluksi
lataus tapahtuu induktanssin ja diodin kautta akkuun A2. Hetken
perästä kytkeytyy hakkuri kahdeksi sekunniksi ja ”pumppaa”
virtaa akkuun A2. Samalla valvotaan, ettei akun A1 jännite putoa
alle 12 V:n. Jos näin tapahtuu, palataan edelliseen askeleeseen ja
odotetaan, että syöttävän jännite on taas yli 13,5 volttia. Näin
jatketaan kunnes testattava akku on ”täynnä”. Sen jälkeen
irrotetaan akku A1 testattavasta akusta, puretaan akku ja mitataan
kapasiteetti. Lopuksi ladataan akku ilman virtapumppausta. Jos
akkujen jännite-ero (A1 – A2 < 0,5 V) on riittävä pieni,
kytketään akut suoraan yhteen. Nämä eri vaiheet tulostetaan
LCD-näytölle.
Ohjelma 56
/* Nimi:
A_Kapa56_v14
Luotu:
30.04.2020
Luoja:
Antti Isännäinen
KUVAUS:
Pyrkimyksenä on
tutkia akun jäljellä oleva kapasiteetti
ympäristössä,
missä enenergiaa talletetaan useisiin
rinnakkain
kytkettyihin akkuihin. Ja missä energia
tuotetaan
arinkopaneeleilla ja tuuligeneraattoreilla.
*/
//
MÄÄRITTELYT:
#include
<LiquidCrystal.h>
LiquidCrystal
lcd(3, 2, 7,6,5,4);
const
byte api = B11100001;
//
Kellon määrittely
unsigned
long Ulo_MilliSek = 0;
unsigned
long Ulo_UusiMilliSek = 0;
unsigned
long Ulo_PulsMiSek = 0;
int
Int_Viive = 100;
int
Int_LCDvii = 300;
int
Int_Sekunti = 0;
int
Int_ViSek = 0;
boolean
Bol_LCD_tulostus = false;
unsigned
long Ulo_UusiLCD = 0;
boolean
Bol_AskelViive = false;
//
Tekstit
char
tx1[] = "V";
char
tx2[] = "A";
char
tx3[] = "A1";
char
tx4[] = "A2";
char
tx5[] = "VAL. KUORMA => START";
char
tx6[] = "Kuorma: 3 == 5.25 A";
char
tx7[] = "Kuorma: 2 == 3.50 A";
char
tx8[] = "Kuorma: 1 == 1.75 A";
char
tx9[] = "VALMISTELUT:";
char
tx10[] = "ODOTTAA: A1>13.5V";
char
tx11[] = "A2 LATAUS";
char
tx12[] = "A2 PURKAUS";
char
tx13[] = "VALMIS";
char
tx14[] = "AKUT KYTKETTY YHTEEN";
char
tx15[] = "Ah";
//
Analogiatulot
const
int Con_A1V = 0;
const
int Con_A2V = 1;
const
int Con_Virta = 2;
//
Muuttujat
int
Int_A1raaka = 0;
float
A1_Jannite = 0.00;
int
Int_A2raaka = 0;
float
A2_Jannite = 0.00;
int
Int_VirtaPohja = 0;
int
Int_Virta = 0;
float
Flo_Virta = 0.00;
boolean
Bol_Summaus = false;
int
Int_Kapasi = 0;
float
Flo_Kapasi = 0.00;
float
Flo_U_Ero = 0.00;
//
Kuormituksen ja käynnistyksen valinta
const
int Con_Start = 18;
boolean
Bol_Start = false;
const
int Con_Kuorma = 19;
boolean
Bol_Kuorma = false;
int
Seq_Kuorma = 1;
const
int Con_K1 = 8;
const
int Con_K2 = 10;
const
int Con_K3 = 9;
const
int Con_K4 = 11;
const
int Con_Pulssi = 13;
boolean
Bol_Pulssi = false;
int
Int_Lamput = 3;
int
Seq_Mittaus = 0;
//
ALIOHJELMAT
//
Näytön aliohjelmat
//
Tekstien päivitys
void
Fun_Teksti(int kohta, int
rivi, char teksti[]){
lcd.setCursor(kohta, rivi);
lcd.print(teksti);
}//
Teksti_ali loppu
//Numeroiden
päivitys
void
Fun_Mittaus(int kohta, int
rivi, float lukema){
lcd.setCursor(kohta, rivi);
lcd.print(lukema);
}//
Mittaus_ali loppu
//
Releyksikön aliohjelma
void
Fun_Rele(int k1,int
k2,int k3,int
k4){
delay(50);
digitalWrite(Con_K1, k1);
digitalWrite(Con_K2, k2);
digitalWrite(Con_K3, k3);
digitalWrite(Con_K4, k4);
delay(100);
}//
Rele aliohjelman loppu
//
Kuormavalinnan aliohjelma
void
Fun_Kuormitus(int valinta){
switch
(valinta) {
case
1:
Fun_Teksti(0,
1, tx8);
break;
case
2:
Fun_Teksti(0,
1, tx7);
break;
case
3:
Fun_Teksti(0,
1, tx6);
break;
}//
Sekvenssi loppu
}//
Kuormitusvalinnan aliohjelman loppu
//
ASETUKSET:
void
setup(){
Serial.begin(9600);
lcd.begin(20,2);
Fun_Teksti(0, 0,
tx5);
Fun_Teksti(0, 1,
tx6);
pinMode(Con_Kuorma, INPUT_PULLUP);
pinMode(Con_Start, INPUT_PULLUP);
pinMode(Con_K1,
OUTPUT);
pinMode(Con_K2,
OUTPUT);
pinMode(Con_K3,
OUTPUT);
pinMode(Con_K4,
OUTPUT);
pinMode(Con_Pulssi, OUTPUT);
Fun_Rele(1, 0, 0,
0); // Asetetaan releiden perusasetus
delay(Int_Viive
* 7);
Int_VirtaPohja =
analogRead(Con_Virta);
Ulo_UusiMilliSek
= millis();
}//
Asetuksen loppu
//
PÄÄLOOPPI
void
loop(){
Ulo_MilliSek =
millis();
if(Ulo_MilliSek
> Ulo_UusiMilliSek + (Int_Viive * 10)){
Bol_Summaus =
true;
Int_Sekunti += 1;
Int_ViSek += 1;
Ulo_UusiMilliSek
= millis();
}
// Tahdistus loppu
//
LCD-näytön tahdistus
if(Seq_Mittaus
> 0){
if(Ulo_MilliSek
> Ulo_UusiLCD + Int_LCDvii){
Bol_LCD_tulostus
= true;
lcd.clear();
Ulo_UusiLCD =
millis();
}} //
Näytön päivityksen loppu
//Mittaukset
Int_A1raaka =
analogRead(Con_A1V);
A1_Jannite =
Int_A1raaka / 60.176;
Int_A2raaka =
analogRead(Con_A2V);
A2_Jannite =
Int_A2raaka / 60.176;
Int_Virta =
analogRead(Con_Virta);
Int_Virta =
Int_Virta - Int_VirtaPohja;
Flo_Virta =
Int_Virta * 0.11;
//
Kytkimet
Bol_Kuorma =
!digitalRead(Con_Kuorma);
Bol_Start =
!digitalRead(Con_Start);
if(Bol_Start
== true && Seq_Kuorma > 0){
Seq_Mittaus =
1;
Seq_Kuorma = 0;
Int_ViSek = 0;
}
// Kuormavalinta loppu
//
Kuormavalinnan sekvenssi
switch
(Seq_Kuorma) {
case
1:
if(Bol_Kuorma
== true && Ulo_MilliSek -
Ulo_UusiMilliSek > (Int_Viive * 2)){
Ulo_UusiMilliSek = Ulo_MilliSek;
Int_Lamput
--;if(Int_Lamput == 0){Int_Lamput = 3;}
Fun_Kuormitus(Int_Lamput);
Seq_Kuorma = 2;
}
break;
case
2:
if(Bol_Kuorma
== false){Seq_Kuorma = 1;}
break;
}//
Sekvenssin loppu
//
PÄÄSEKVENSSI
//
Akun kapasiteetin mittaussekvenssi
switch
(Seq_Mittaus) {
case
1: // Valmistelut
if(Bol_LCD_tulostus == true){
Fun_Teksti(0,
0, tx9);
Fun_Teksti(0,
1, tx3);
Fun_Teksti(11, 1, tx4);
Fun_Mittaus(3, 1, A1_Jannite);
Fun_Teksti(8,
1, tx1);
Fun_Mittaus(14, 1, A2_Jannite);
Fun_Teksti(19, 1, tx1);
} //
LCD-tulostus
//
Tarkastetaan, ettei akkujen jännite-ero ole liian suuri
if(A2_Jannite
> (A1_Jannite - 2.0)){
if(Int_ViSek
> 3){
Seq_Mittaus
= 2;
Int_ViSek =
0;
}//
Viiven loppu
}//
Jännitetarkastuksen loppu
break;
case
2: // Odottaa, että A1 > 13.5 V
if(Bol_LCD_tulostus == true){
Fun_Mittaus(3, 1, A1_Jannite);
Fun_Teksti(8, 1, tx1);
Fun_Teksti(0, 0, tx10);
Fun_Teksti(0, 1, tx3);
Fun_Teksti(11, 1, tx4);
Fun_Teksti(19, 1, tx1);
Fun_Mittaus(3, 1, A1_Jannite);
Fun_Mittaus(14, 1, A2_Jannite);
} //
LCD-tulostus loppu
if(A1_Jannite
> 13.5 && Int_ViSek > 3){
Int_ViSek =
0;
Ulo_PulsMiSek
= Ulo_MilliSek;
Bol_Pulssi =
true;
Seq_Mittaus =
3;
}
// Jännite ja viivetarkastus loppu
break;
case
3: // Latausaskel
if(Bol_LCD_tulostus == true){
Fun_Teksti(0,
0, tx11);
Fun_Teksti(0,
1, tx3);
Fun_Teksti(8,
1, tx1);
Fun_Teksti(11, 1, tx4);
Fun_Teksti(19, 1, tx1);
Fun_Mittaus(3, 1, A1_Jannite);
Fun_Mittaus(14, 1, A2_Jannite);
Fun_Mittaus(11, 0, -1 * Flo_Virta);
Fun_Teksti(15, 0, tx2);
} //
LCD-tulostus loppu
Fun_Rele(0,
0, 0, 0);
if(Bol_Pulssi
== true && Ulo_MilliSek >
Ulo_PulsMiSek + 2000){
Ulo_PulsMiSek = Ulo_MilliSek;
Bol_Pulssi
= false;
} //
Pulssitus päällä
if(Bol_Pulssi
== false && Ulo_MilliSek >
Ulo_PulsMiSek + 1000){
Ulo_PulsMiSek = Ulo_MilliSek;
Bol_Pulssi =
true;
} //
Pulssitus pois päältä
digitalWrite(Con_Pulssi, Bol_Pulssi);
//
Tarkastetaan, onko ladattava akku täysi
if(A2_Jannite
> 14.5){
Bol_Pulssi =
false; digitalWrite(Con_Pulssi,
Bol_Pulssi);
Int_ViSek = 0;
Seq_Mittaus =
4;
} //
Latausgeneraattorin pysäytys loppu
//
Tarkastetaan, laskeeko syöttöjännite liikaa
if(A1_Jannite
< 12.0){
Bol_Pulssi =
false; digitalWrite(Con_Pulssi,
Bol_Pulssi);
Seq_Mittaus =
2;}
break;
case
4: // Akun purkaus
if(Bol_Summaus
== true){
Flo_Kapasi =
Flo_Kapasi + 1 * Flo_Virta;
}//
Kapasiteetin keruun loppu
if(Bol_LCD_tulostus == true){
Fun_Teksti(0,
0, tx12);
Fun_Teksti(0,
0, tx12);
Fun_Teksti(15, 1, tx2);
Fun_Mittaus(12, 0, Flo_Kapasi / 3600);
Fun_Teksti(17, 0, tx15);
Fun_Teksti(0,
1, tx4);
Fun_Teksti(8,
1, tx1);
Fun_Mittaus(3, 1, A2_Jannite);
Fun_Mittaus(11, 1, 1 * Flo_Virta);
} //
LCD-tulostus loppu
// Valitaan asettettu kuorma
if(Int_Lamput
== 3){Fun_Rele(1,1,1,0);}
else
if(Int_Lamput == 2){Fun_Rele(1,0,1,0);}
else
{Fun_Rele(1,1,0,0);}
if(Int_ViSek
> 5 && A2_Jannite < 11.0){
Seq_Mittaus
= 5;
Int_ViSek =
0;
}//
viiven loppu
break;
case
5: // Lataus
if(Bol_LCD_tulostus == true){
Fun_Teksti(0,
0, tx11);
Fun_Mittaus(11, 0, Flo_Kapasi / 3600);
Fun_Teksti(17, 0, tx15);
Fun_Teksti(0,
1, tx3);
Fun_Mittaus(3, 1, A1_Jannite);
Fun_Teksti(8,
1, tx1);
Fun_Teksti(11, 1, tx4);
Fun_Mittaus(14, 1, A2_Jannite);
Fun_Teksti(19, 1, tx1);
} //
LCD-tulostus loppu
Fun_Rele(0, 0,
0, 0);
Flo_U_Ero =
A1_Jannite - A2_Jannite;
if(Int_ViSek
> 5 && Flo_U_Ero < 0.5){
Seq_Mittaus =
6;
Int_ViSek =
0;
}//
viiven loppu
break;
case
6: // Valmis
if(Bol_LCD_tulostus == true){
Fun_Teksti(0,
0, tx13);
Fun_Teksti(8,
0, tx4);
Fun_Mittaus(11, 0, Flo_Kapasi / 3600);
Fun_Teksti(17, 0, tx15);
Fun_Teksti(0,
1, tx14);
} //
LCD-tulostus loppu
Fun_Rele(1, 0,
0, 1);
break;
}//
Mittaussekvenssi loppu
Bol_Summaus =
false;
Bol_LCD_tulostus =
false;
Bol_AskelViive =
false;
delay(1);
}
// Pääohjelma LOPPU